OMNIVIS project 2009
Jose Ramirez Thesis
OMNIVIS: 3D Space and Camera Path Reconstruction for Omni-directional Vision
by
Oliver Knill and Jose Ramirez
Office: SciCtr 434
Email:
knill@math.harvard.edu
Main page
Exhibits
2007 work
Source Code
Diary (and updates)
Florida 2009
Japan 2009
Feature Tracking C
Feature Tracking KLT
Omni camera in Povray
Image Filters Mathematica
Corner detection 1
Corner detection 2
Corner detection 3
Corner detection 4
Corner detection 5
Hamiltonian flow
Hamiltonian flow 2
Hamiltonian flow 3
Hamiltonian flow 4
Balloons Gradient
Balloons Tracking
Common room Matching
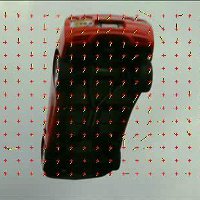
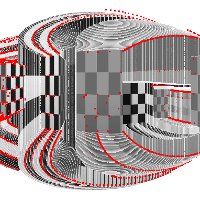
Iphone Stitching
Rubic cube Matching
Harvard office
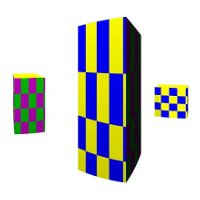
Cubes Matching
Hand Tracking
Cubes Matching
Point tracking
Cubes tracking
Vector field
Vector field
Curvature
Questions and comments to
knill@math.harvard.edu
Oliver Knill
|
Department of Mathematics
|
Harvard University