|
Schlaefli's theorem states that there are exactly 6 regular convex platonic solids in 4 dimensions. It is the analogue of the ancient
Theorem of Theaetetus which tells that there are exactly 5 regular platonic solids in 3 dimensions. For the platonic solids, only the
octahedron and icosahedron are 2 dimensional, the cube and dodecahedron are one dimensional, the tetrahedron 3 dimensional. Here is the
situation in higher dimension:
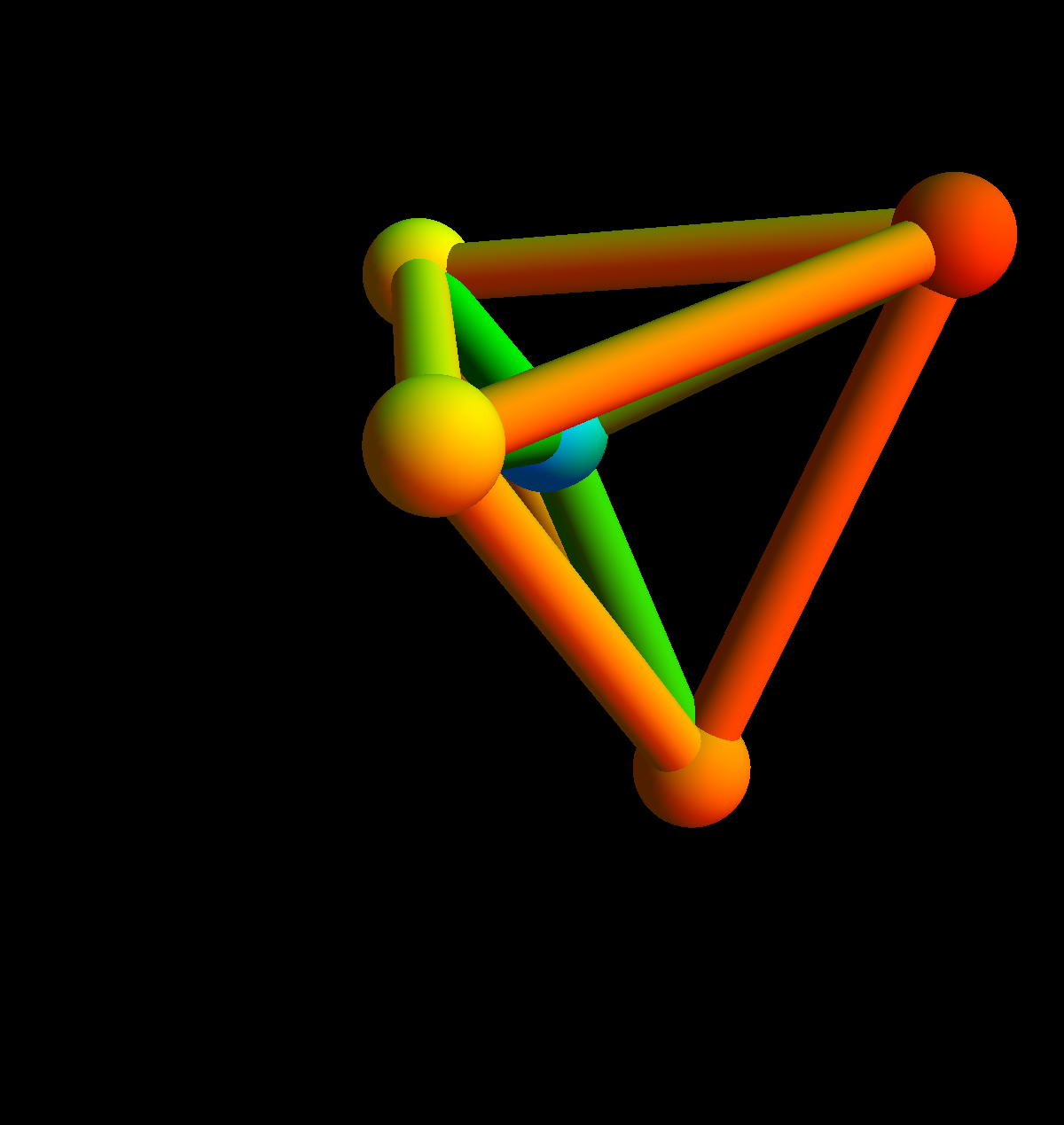
The 5 cell is the tetrahedron analogue and exists in any dimension. The 5 cell
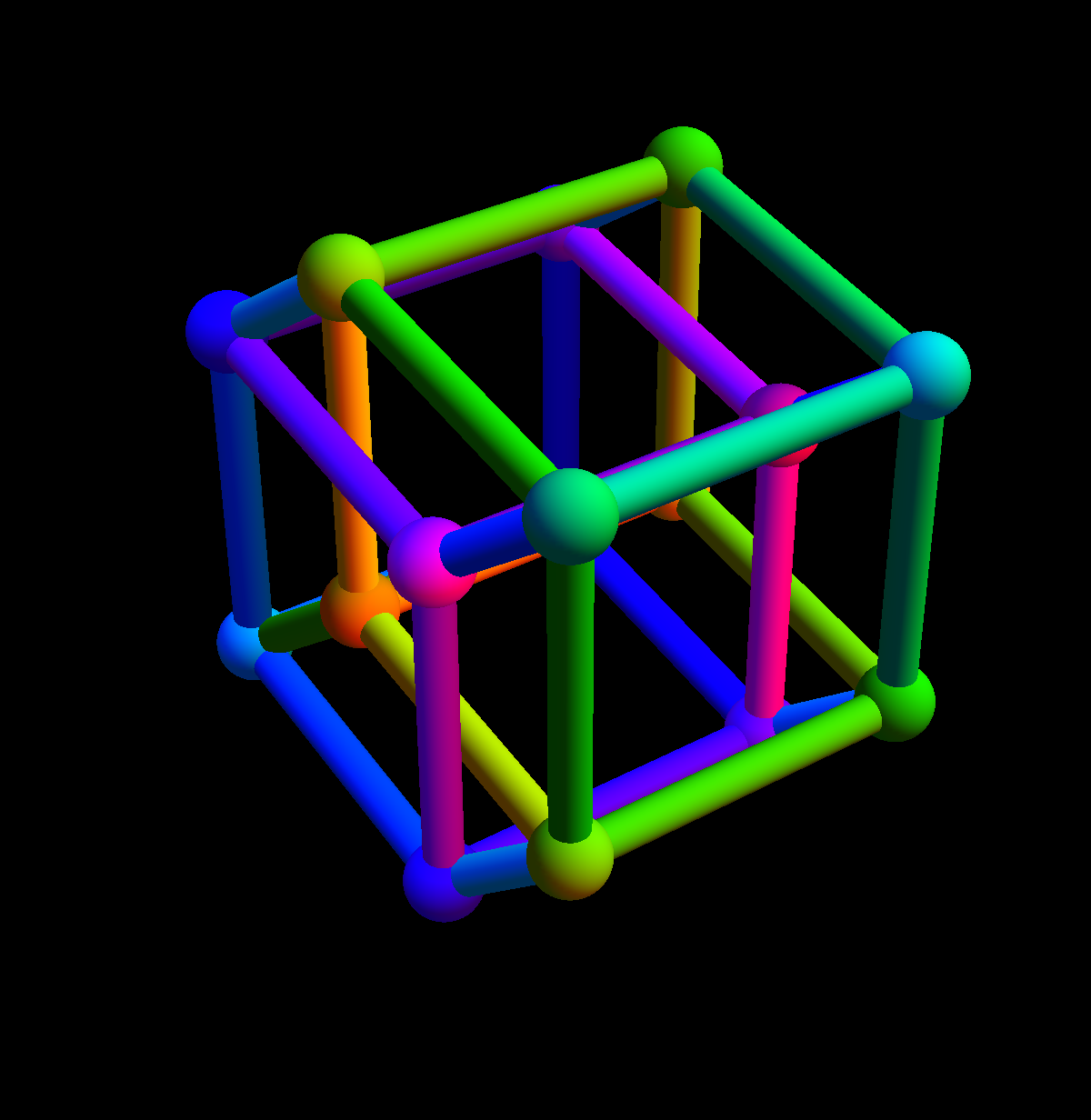
is a 4 dimensional graph. We have to truncate vertices to get a 3 dimensional graph. The 8 cell is the tesseract, the hypercube and exists in
any dimension. Like all cubes, the dimension is 1. The unit spheres are 0 dimensional.
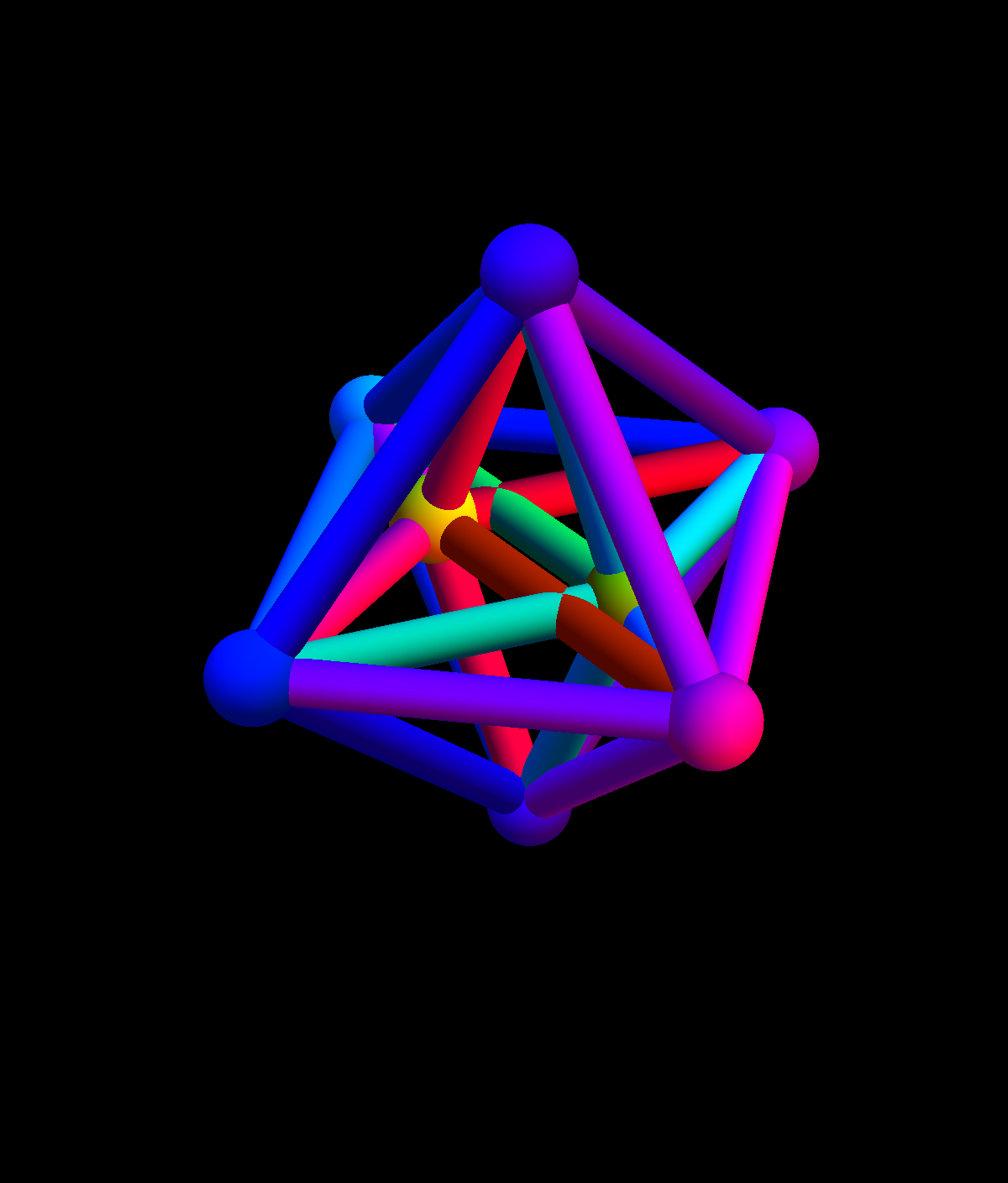
We have to stellate the spaces and faces to get a 3 dimensional graph. The 16 cell is the octahedron analogue and exists in
any dimension. It is a cross polytop and a 3 dimensional graph of constant Eulerian curvature form (I found in 2009 for graphs).
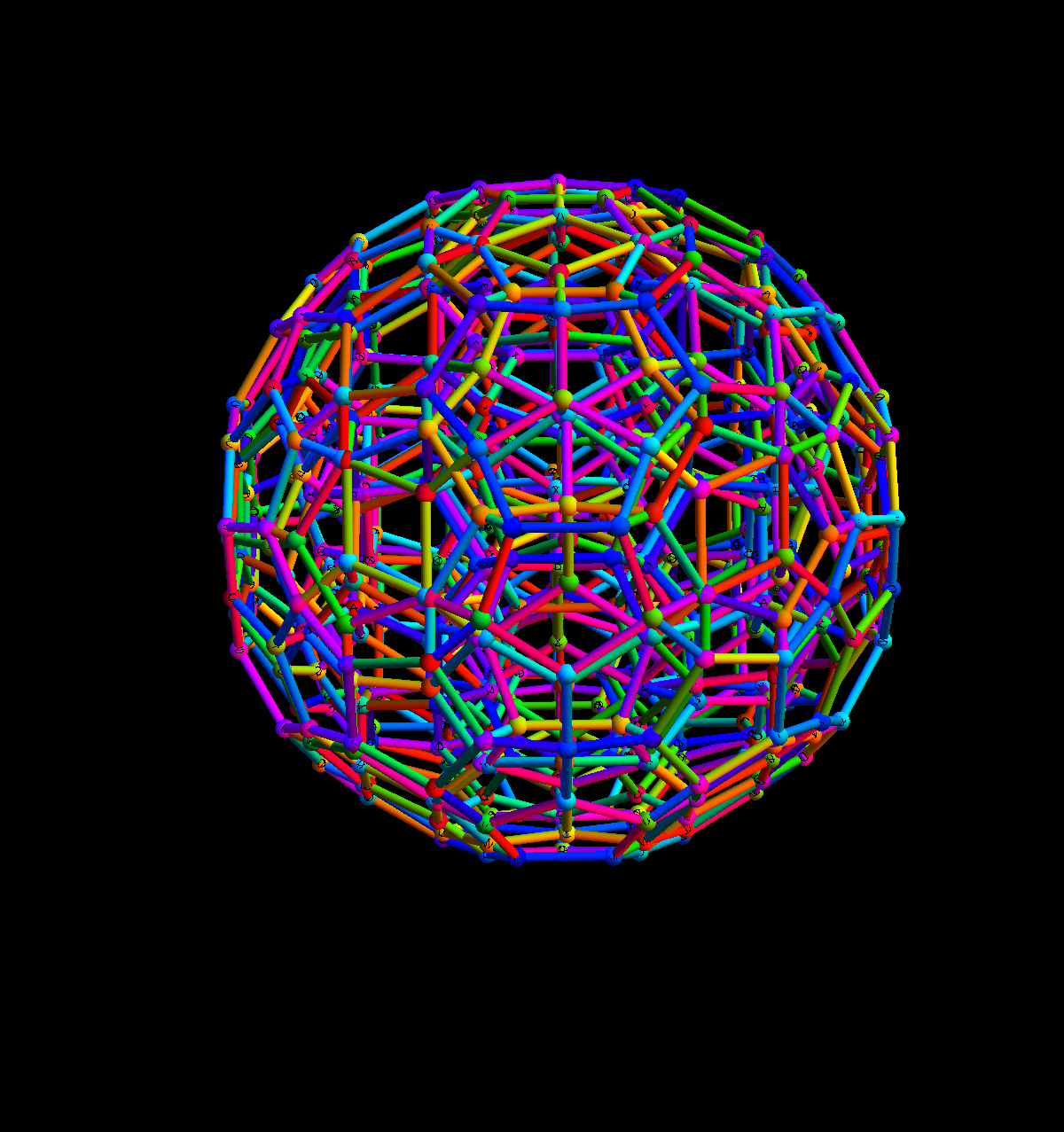
It is also the smallest 3 dimensional graph at all. The 24 cell is one dimensional too. Also the 120 cell is a one dimensional graph.
Its spaces are filled dodecahedra. We have to stellate them to get a 3 dimensional graph. The 600 cell however is again 3 dimensional.
The pictures below have been produced in Mathematica 8. The polytopes are first turned by a random rotation in 4 dimensions and then projected
to three dimensions. The color encodes the 4th dimension. I had produced the Mathematica code for a
Math circle talk given in June 2009. The topic for that
talk was chosen, while I had been working on curvature questions in graph theory both for two and higher dimensional graphs.
My Mathematica code has evolved since. While in 2009, I had worked with the objects in Euclidean space directly (for the above objects), I would
in 2010 work almost exclusively with adjacency matrices, which is a bit inefficient.
In 2011, with Mathematica 8, it became more efficient to work directly with graphs as objects without using multivariable calculus
(realization in Euclidean space) or linear algebra (realization as adjacency matrices).
Graphs had been implemented much already in Mathematica but the number of built in routines like finding the unit sphere of a vertex
made things easier.
|