HCRP project 2009
Computing Geodesics
Numerics of Geodesics Computation
Office: SciCtr 434
Email: knill@math.harvard.edu
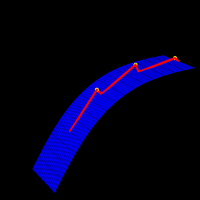 There is a fast method to compute geodesics on surfaces embedded in space: do a free evolution
in space with a strong force gluing the particle to the surface.
Illustrations
done for the book "Moser: Selected topics in the calculus of variations" (appeared in 2003)
have used this method.
Example [ JPG ]. Even with
primitive Euler steps, the evolution is assured to stay on the unit tangent bundle.
This handout (PDF)
from 2005 explains this method briefly. This method has also been used by Sinclair in
this article.
This method is justified by the fact that the differential equations of a geodesic on a hyperplane
are x'' = - n (Dj n_k) xk xj = - (Dx' n) n.
These equations tell that the 'force' gluing the geodesics onto the hypersurface is normal
towards the surface and has as its magnitude the covariant derivative of n in the velocity direction x'.
This is the infinitesimal description of "moving straight" while being "pulled back normally" to the surface just
enough to stay on the surface.
There is a fast method to compute geodesics on surfaces embedded in space: do a free evolution
in space with a strong force gluing the particle to the surface.
Illustrations
done for the book "Moser: Selected topics in the calculus of variations" (appeared in 2003)
have used this method.
Example [ JPG ]. Even with
primitive Euler steps, the evolution is assured to stay on the unit tangent bundle.
This handout (PDF)
from 2005 explains this method briefly. This method has also been used by Sinclair in
this article.
This method is justified by the fact that the differential equations of a geodesic on a hyperplane
are x'' = - n (Dj n_k) xk xj = - (Dx' n) n.
These equations tell that the 'force' gluing the geodesics onto the hypersurface is normal
towards the surface and has as its magnitude the covariant derivative of n in the velocity direction x'.
This is the infinitesimal description of "moving straight" while being "pulled back normally" to the surface just
enough to stay on the surface. For our Spring 2009 project, we computed caustics directly by integrated the differential equations
g''(t)k + Gijk gi'(t) gj'(t) = 0
f''(t) + K(g(t)) f(t) = 0
The code is very general and can handle any parametrized surface r(u,v) = (x(u,v),y(u,v),z(u,v)).
Integrating the differential equations numerically with built in NDSolve method in the computer algebra
system was not good enough for us. Here are the reasons:
u'' = -(2*a^2*b^2*u'*v'*cos(u)^4*cos(v)^2*cot(v) -
((a^2 - b^2)*(-u'^2 - 2*v'^2 + u'^2*cos(2*v))*sin(2*u))/4 +
b^2*u'*v'*cos(u)^2*(4*a^2*cos(v)^2*cot(v)*sin(u)^2 + sin(2*v)) +
a^2*u'*v'*sin(u)^2*(2*b^2*cos(v)^2*cot(v)*sin(u)^2 + sin(2*v)))/
(a^2*b^2*cos(u)^4*cos(v)^2 + b^2*cos(u)^2*(2*a^2*cos(v)^2*sin(u)^2 +
sin(v)^2) + a^2*sin(u)^2*(b^2*cos(v)^2*sin(u)^2 + sin(v)^2));
v''= -(-2*(-(b^2*v'^2) + a^2*(-v'^2 + 2*b^2*(u'^2 + v'^2)) +
(a^2 - b^2)*v'^2*cos(2*u))*sin(2*v))/(2*a^2 + 2*b^2 +
4*a^2*b^2 - 2*(a^2 - b^2)*cos(2*u) + (a^2 - b^2)*cos(2*(u - v)) -
2*a^2*cos(2*v) - 2*b^2*cos(2*v) + 4*a^2*b^2*cos(2*v) +
a^2*cos(2*(u + v)) - b^2*cos(2*(u + v)));
f''= - f (a^2*b^2)/(a^2*b^2*cos(u)^4*cos(v)^2 + b^2*cos(u)^2*
(2*a^2*cos(v)^2*sin(u)^2 + sin(v)^2) + a^2*sin(u)^2*
(b^2*cos(v)^2*sin(u)^2 + sin(v)^2))^2
When dealing with a single case, optimizations could be done like storing terms
like cos(2*(u-v)) before so that the cos does not have to be computed several
times. In general, we have much more complicated formulas: here is an example
of an asymetrically deformed torus:
r(u,v)={(2+(1+R cos(u)) cos(v)) cos(u),(2+(1+R cos(u)) cos(v))sin(u),sin(v)};
u'' = (-8 (-(R (-up^2 + vp^2 + R vp^2 cos(u)) cos(v)^4 sin(u)) +
2 up cos(v)^3 (R up sin(u) + vp (1 + R^2 + 2 R cos(u)) sin(v)) +
(up (1 + R cos(u))^2 cos(v) sin(v)^2 (8 R up sin(u) +
2 vp (2 + R^2 + 4 R cos(u) + R^2 cos(u)^2) sin(v) -
2 R^2 vp sin(u)^2 sin(v)))/2 + cos(v)^2 sin(v)
(4 up vp - R vp^2 sin(u) sin(v) + 6 R^2 up^2 cos(u)^3 sin(u) sin(v) +
6 R^3 up^2 cos(u)^4 sin(u) sin(v) + 2 R^4 up^2 cos(u)^5 sin(u)
sin(v) + 2 R up^2 sin(u)^3 sin(v) + 2 R up^2 cos(u)^2 sin(u)
(1 + 3 R^2 sin(u)^2) sin(v) + R cos(u) (4 up vp -
R vp^2 sin(u) sin(v) + 6 R up^2 sin(u)^3 sin(v))) +
(up (64 vp cos(u)^2 sin(v)^3 + 192 R vp cos(u)^3 sin(v)^3 +
192 R^2 vp cos(u)^4 sin(v)^3 + 64 R^3 vp cos(u)^5 sin(v)^3 +
64 vp sin(u)^2 sin(v)^3 + 96 R vp sin(u) sin(2 u) sin(v)^3 +
R^2 sin(2 u)^2 (16 vp (3 + R cos(u)) sin(v)^3 + R^2 up sin(2 u)
sin(2 v)^2)))/16))/(32 (1 + R cos(u)) cos(v)^3 +
8 (1 + R^2 + 2 R cos(u)) cos(v)^4 + 32 cos(u)^2 sin(v)^2 +
64 R cos(u)^3 sin(v)^2 + 32 R^2 cos(u)^4 sin(v)^2 +
32 (1 + R cos(u))^3 cos(v) sin(v)^2 + 32 sin(u)^2 sin(v)^2 +
16 R cos(u) (5 + cos(2 v)) sin(u)^2 sin(v)^2 +
8 R^2 sin(2 u)^2 sin(v)^2 + 8 cos(v)^2 (4 + cos(u)^2 sin(v)^2 +
4 R cos(u)^3 sin(v)^2 + 4 R^3 cos(u)^5 sin(v)^2 +
R^4 cos(u)^6 sin(v)^2 + R^2 cos(u)^4 (6 + R^2 sin(u)^2) sin(v)^2) +
2 sin(u)^2 sin(2 v)^2 + 3 R^2 sin(2 u)^2 sin(2 v)^2 +
R^3 csc(u) sin(2 u)^3 sin(2 v)^2);
v'' = (8 sin(v) (R^4 (2 up^2 + vp^2) cos(u)^6 cos(v)^3 +
R^3 cos(u)^5 cos(v)^2 (10 up^2 + 4 vp^2 + (7 up^2 + 4 vp^2) cos(v)) +
cos(v)^3 (-vp^2 + (up^2 + vp^2 - R^2 vp^2) sin(u)^2 +
2 R^2 up^2 sin(u)^4) + cos(v)^2 (-4 vp^2 + (6 up^2 + 4 vp^2)
sin(u)^2 + 4 R^2 up^2 sin(u)^4) + 8 up sin(u)^2
(up - R vp sin(u) sin(v)) + 4 cos(v) (-vp^2 + (3 up^2 + vp^2)
sin(u)^2 - R up vp sin(u)^3 sin(v)) +
R cos(u)^3 (2 cos(v)^2 (11 up^2 + 6 vp^2 + R^2 (7 up^2 + 2 vp^2)
sin(u)^2) + cos(v)^3 (5 up^2 + 4 vp^2 + R^2 (11 up^2 + 4 vp^2)
sin(u)^2) + 8 up (up - R vp sin(u) sin(v)) +
4 cos(v) (7 up^2 + 2 vp^2 - 2 R up vp sin(u) sin(v))) +
R cos(u) (2 cos(v)^2 (-2 vp^2 + (11 up^2 + 6 vp^2) sin(u)^2 +
2 R^2 up^2 sin(u)^4) + cos(v)^3 (-2 vp^2 + (5 up^2 + 4 vp^2)
sin(u)^2 + 4 R^2 up^2 sin(u)^4) + 8 up sin(u)^2
(up - R vp sin(u) sin(v)) + 4 cos(v) sin(u)^2 (7 up^2 + 2 vp^2 -
2 R up vp sin(u) sin(v))) + R^2 cos(u)^4 cos(v)
(2 (13 up^2 + 6 vp^2) cos(v) + cos(v)^2 (9 up^2 + 6 vp^2 +
R^2 (4 up^2 + vp^2) sin(u)^2) + 4 (4 up^2 + vp^2 -
R up vp sin(u) sin(v))) + cos(u)^2
(2 cos(v)^2 (3 up^2 + 2 vp^2 + 3 R^2 (5 up^2 + 2 vp^2) sin(u)^2) +
cos(v)^3 (up^2 + vp^2 - R^2 vp^2 + R^2 (11 up^2 + 6 vp^2) sin(u)^2 +
2 R^4 up^2 sin(u)^4) + 8 up (up - R vp sin(u) sin(v)) +
4 cos(v) (3 up^2 + vp^2 + R^2 (4 up^2 + vp^2) sin(u)^2 -
R up vp sin(u) sin(v) - R^3 up vp sin(u)^3 sin(v)))))/
(32 (1 + R cos(u)) cos(v)^3 + 8 (1 + R^2 + 2 R cos(u)) cos(v)^4 +
32 cos(u)^2 sin(v)^2 + 64 R cos(u)^3 sin(v)^2 +
32 R^2 cos(u)^4 sin(v)^2 + 32 (1 + R cos(u))^3 cos(v) sin(v)^2 +
32 sin(u)^2 sin(v)^2 + 16 R cos(u) (5 + cos(2 v)) sin(u)^2 sin(v)^2 +
8 R^2 sin(2 u)^2 sin(v)^2 + 8 cos(v)^2 (4 + cos(u)^2 sin(v)^2 +
4 R cos(u)^3 sin(v)^2 + 4 R^3 cos(u)^5 sin(v)^2 +
R^4 cos(u)^6 sin(v)^2 + R^2 cos(u)^4 (6 + R^2 sin(u)^2) sin(v)^2) +
2 sin(u)^2 sin(2 v)^2 + 3 R^2 sin(2 u)^2 sin(2 v)^2 +
R^3 csc(u) sin(2 u)^3 sin(2 v)^2);
f'' = -f (2 cos(v) (352 + 240 R^2 + 8 R (76 + 17 R^2) cos(u) +
176 R^2 cos(2 u) + 24 R^3 cos(3 u) + 20 R cos(u - 3 v) +
25 R^3 cos(u - 3 v) + 6 R^2 cos(2 u - 3 v) + 4 R^4 cos(2 u - 3 v) +
176 R cos(u - 2 v) + 68 R^3 cos(u - 2 v) + 12 R^3 cos(3 u - 2 v) +
508 R cos(u - v) + 75 R^3 cos(u - v) + 88 R^2 cos(2 (u - v)) +
3 R^3 cos(3 (u - v)) + 178 R^2 cos(2 u - v) + 12 R^4 cos(2 u - v) +
9 R^3 cos(3 u - v) + 408 cos(v) + 372 R^2 cos(v) + 24 R^4 cos(v) +
96 cos(2 v) + 240 R^2 cos(2 v) + 8 cos(3 v) + 60 R^2 cos(3 v) +
8 R^4 cos(3 v) + 508 R cos(u + v) + 75 R^3 cos(u + v) +
88 R^2 cos(2 (u + v)) + 3 R^3 cos(3 (u + v)) + 178 R^2 cos(2 u + v) +
12 R^4 cos(2 u + v) + 9 R^3 cos(3 u + v) + 176 R cos(u + 2 v) +
68 R^3 cos(u + 2 v) + 12 R^3 cos(3 u + 2 v) + 20 R cos(u + 3 v) +
25 R^3 cos(u + 3 v) + 6 R^2 cos(2 u + 3 v) + 4 R^4 cos(2 u + 3 v)))/
(32 (1 + R cos(u)) cos(v)^3 + 8 (1 + R^2 + 2 R cos(u)) cos(v)^4 +
32 cos(u)^2 sin(v)^2 + 64 R cos(u)^3 sin(v)^2 +
32 R^2 cos(u)^4 sin(v)^2 + 32 (1 + R cos(u))^3 cos(v) sin(v)^2 +
32 sin(u)^2 sin(v)^2 + 16 R cos(u) (5 + cos(2 v)) sin(u)^2 sin(v)^2 +
8 R^2 sin(2 u)^2 sin(v)^2 + 8 cos(v)^2 (4 + cos(u)^2 sin(v)^2 +
4 R cos(u)^3 sin(v)^2 + 4 R^3 cos(u)^5 sin(v)^2 +
R^4 cos(u)^6 sin(v)^2 + R^2 cos(u)^4 (6 + R^2 sin(u)^2) sin(v)^2) +
2 sin(u)^2 sin(2 v)^2 + 3 R^2 sin(2 u)^2 sin(2 v)^2 +
R^3 csc(u) sin(2 u)^3 sin(2 v)^2)^2;
|